
众口不一的行泊一体,终于被说清楚了
2022 年,在智能汽车领域,几乎无人不谈「行泊一体」。
「行车和泊车共用同一个域控制器,实现传感器深度复用、计算资源共享,在提高用户智驾体验的同时,也帮助主机厂降本增效,大大提高了后者的开发效率……」这差不多是做「行泊一体」自动驾驶企业的惯用话术。
然而在实际中,该类型方案的表现却一言难尽,差别巨大。大部分所谓的行泊一体只是将硬件并到一个「盒子」里,功能并没有发生改变,用户体验也没有得到明显提升。
面对成效上的千差万别,甚至让人怀疑不同公司所说的「行泊一体」是否指的是同一件事情。
因此,一些行业人士根据长期的思考和实践提出了行泊一体的不同形态,以 1.0、2.0 甚至是 3.0 来区分不同方案在本质上的巨大差异,阐述各家的行泊一体为什么在功能、体验、硬件、成本等方面相去甚远。

在这方面,量产自动驾驶方面的领先企业或许最具话语权。
近日,汽车之心在国内首个单 TDA4VM 行泊一体项目的开发交付现场,与 Nullmax 纽劢创始人兼 CEO 徐雷进行了深入的交流,梳理了当前行泊一体的量产进展。
这位硅谷职业背景的创业者,有着技术控们一贯的严谨,他把「行泊一体」分为 4 种形态,其中最高阶的 4.0 形态表现为一体化域控制器、单 SOC 系统,以及芯片、传感器持续深度复用,且 NOA 功能不受限制。
目前,Nullmax 是业内少数能提供行泊一体 4.0 方案的公司,其开发了覆盖不同算力的平台化行泊一体解决方案 MaxDrive,并将率先在 TDA4VM 芯片上完成一系列的量产交付。
01
从 1.0-4.0,鱼龙混杂的行泊一体
市面上现在大部分车型采用的仍然是分离式域控制器,即行车域控和泊车域控相分离,行车功能只能调用行车的芯片和传感器,比如前视相机、毫米波雷达,而泊车功能也只能调用泊车的芯片和传感器,比如鱼眼相机、超声波雷达。
这意味着,当一套系统运转时,另一套的硬件就会闲置。
这一情况,被徐雷称之为行泊一体 1.0 形态,不仅电子控制单元(ECU)数量最多,成本也十分高昂。
当中行泊一体的内涵,只是行车、泊车两套功能同时存在于一辆车上。
而 2.0 形态正是前文提到的将两块负责不同功能的 SoC(行车 SoC+泊车 SoC),「貌合神离」地集成在同一个域控制器上,典型如「1 颗 EyeQ4+1 颗 TDA4」或类似的双芯片组合方案,确实减少了一个域控制器,使硬件成本降低约 30%,但属于伪行泊一体架构,计算资源没有得到真正共享,容易出现通讯延迟,不利于数据的融合处理,汽车智驾性能没有提高。
行泊一体 3.0 形态更进一步,在减少域控制器的基础上,再减少一块芯片,直接上单 SoC 系统,使硬件成本降低 50%,但此时又容易出现一个新问题:传感器无法深度复用,功能局限于基础的 ADAS。
也就是说,3.0 形态仍然只能开启部分传感器,仍有一部分传感器处于分时闲置的状态,因此在同样传感器下,其实还有更大的性能空间可以挖掘。
背后的原因在于有些自动驾驶公司,无法做到在一块算力有限的 SoC 上,处理行车和泊车过程中大量传感器同时输入的海量数据。
「这就导致在行车过程中只打开了前摄像头等传感器,泊车过程中也只使用例如鱼眼摄像头进行感知,行、泊在物理上看似一体,在功能上仍然是分离。」
真正的行泊一体不仅能省去部分重叠的硬件,节省成本,还能实现更高的性能。
 徐雷介绍,在路上行驶时,行车系统应该调用鱼眼相机,提升车身周围 360°的近距离感知能力,在拥堵跟车、cut-in 等情况下提高行车表现。举个例子,鱼眼能够用来检测车旁行驶区域的变化,这样当大卡车经过时,系统可以提前做出横向避让。
徐雷介绍,在路上行驶时,行车系统应该调用鱼眼相机,提升车身周围 360°的近距离感知能力,在拥堵跟车、cut-in 等情况下提高行车表现。举个例子,鱼眼能够用来检测车旁行驶区域的变化,这样当大卡车经过时,系统可以提前做出横向避让。
而在停车场内行驶时,系统也可以直接调用前视摄像头,提升车辆前向的感知能力,识别路上的障碍物,提高泊车过程中的行进速度,「比如达到 10 公里每小时以上。」
这些功能如果能在单 SoC 上做到,才能算达到了行泊一体 4.0 形态。
当中的挑战之大不言而喻,既要求自动驾驶企业深入了解自动驾驶的全流程,能够构建高效高性能的整体架构,还要具备强大的软件算法技术,尤其是工程化能力,完成整套方案的实际开发和落地。
这也就意味着,4.0 形态的行泊一体实际上少之又少。
从交付进展上来看,能够像 Nullmax 一样完成全自研行泊一体方案落地的企业也确实是凤毛麟角。
徐雷创业前曾供职于特斯拉,领导搭建了部署于 Autopilot 2.0 系统中 TeslaVision 的深度学习网络,与另一位创始人宋新雨在软件、硬件两方面共同参与 Autopilot 2.0 系统的研发和落地。
因此 Nullmax 从一诞生初,就拥有了强大的软硬件基因。
举个例子,在自动驾驶 SoC 芯片上,通常集成了 CPU、AI 芯片(GPU/FPGA/ASIC)、深度学习加速单元(NPU)等多个模块,如何让感知、融合、规划、控制、地图、定位等功能与之匹配,在最适合的计算单元上运行,就是一个很具挑战的问题。
Nullmax 基于在异构平台丰富的开发经验,通过高效部署深度学习模型、分配不同任务,让各模块发挥出最佳性能。
多个异构计算资源可以并行地重叠处理,提高了资源利用率,吞吐率及加速比,也提高了系统数据处理的帧率。
此外,模块之间还需要考虑清楚信号和数据如何传输,模块或系统失效如何应对等一系列的具体问题。
「说白了就是整个架构之间应该怎么通讯、调度,以及同步。」为此,Nullmax 设计了高效的系统框架,能够让不同模块串联,实现最高效的协同、调度、融合。
可以说,行泊一体的实际量产难度,尤其是模块本身以及模块之间的工程化部署,在过去被远远低估。毕竟,以同级配置实现越级体验的行泊一体 4.0 方案,不可能是一夕而成。
02
软件平台化,Nullmax 进军百万装车量
以 Nullmax 单 TDA4VM 行泊一体方案为例,在仅有 8 TOPS 的 AI 算力下,能够提供领航辅助、高速代驾辅助、拥堵跟车辅助、记忆泊车等一系列的行车、泊车功能。
2021 年,该方案获得某知名主机厂项目定点,采用 2 颗前视摄像头、4 颗鱼眼摄像头、5 颗毫米波雷达、12 颗超声波雷达的传感器配置,部署至 TDA4 自动驾驶域控制器,不仅可以提供丰富、安全的功能体验,更能兼顾硬件的成本。
如今,Nullmax 单 TDA4VM 行泊一体方案即将完成最终交付,预计平台化搭载的车型最终可达数十万辆量产规模。
在此基础上,Nullmax 同样打造了基于双 TDA4VM 的标准版行泊一体,也是业内首个独家定点的双 TDA4VM 周视行泊一体量产方案。
在 16 TOPS 算力下,可以胜任多达前视、周视、环视等 11 颗相机组成的庞大视觉感知,并进行毫米波雷达、超声波雷达等传感器的感知融合,完成高速领航、拥堵跟车、自主泊车、记忆泊车等智驾功能所需的各项任务,在体验上进一步优化。

除了布局中低算力,Nullmax 还正在基于英伟达 Orin 芯片平台,量产大算力行泊一体智能驾驶解决方案。
该行泊一体项目是国内首个基于标准版 Orin 芯片平台落地,涵盖高速、城市和泊车的全场景量产应用,提供导航辅助驾驶、拥堵跟车、泊车辅助、常规 ADAS 等全部主流功能。
预计到 2023 年,该平台化项目的首款车型将上市交付,最终的量产总规模接近百万辆。
据了解,Nullmax 将完全自主知识产权的数据闭环工具链运用其中,助力打造自动化的闭环数据平台,支持更多创新功能的加入和自动驾驶功能 OTA 升级。
可以看到,Nullmax 能够基于德州仪器 TDA4、英伟达 Orin 等不同芯片平台推出差异化的行泊一体方案,实现不同层次的智驾体验。而且,很多的量产项目也是平台化项目,涉及多个车型。
「如果说在一个平台上做行泊一体称得上难,那么扩展到多个平台则是难上加难。」一位业内人士指出,不同平台之间的架构天差地别,很难将算法简单迁移复制。
也正是基于这个原因,不少自动驾驶企业要么花费大量的精力在不同平台之间做适配,效率低下且投入大,要么只专注做一个平台,延展性有限。
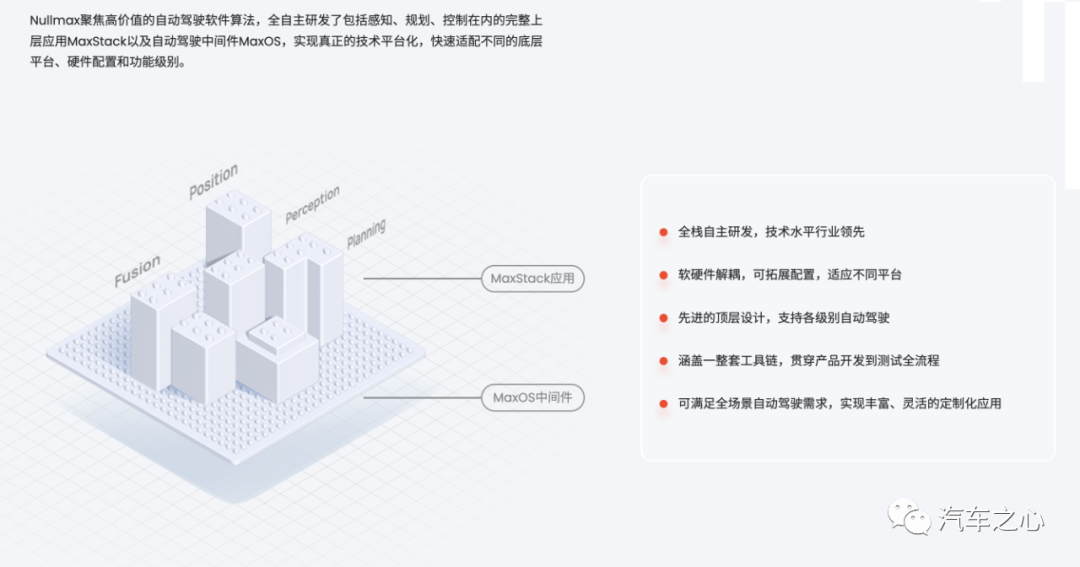
Nullmax 没有「多选一」,而是「好的都要」,其秘诀就在于将软件平台化,推出了涵盖全套自动驾驶应用层算法模块、中间件系统的 MaxDrive 平台。
徐雷以硬件中的通用底盘,阐述了的「平台化」的概念。
把通用底盘打磨好,然后按照不同需求,在上面开发成皮卡、SUV、厢式货车等,这就是硬件中的平台化。
「软件平台化与之类似,在智能驾驶中表现为用一套软件,适配不同数量的传感器、不同算力的芯片。」

徐雷将 Nullmax 的 MaxDrive 平台比喻为「树干」,不论是在何种算力的基础上做开发,「树干」都是同一个,区别只在于「树枝」。
「比如要检测一台车,在大算力条件下,我们可能会用到深度学习、Transformer 等技术做图像特征提取,去判断它是不是一台车,而在小算力条件中,就没有这么多『树枝』来做这件事。」
「软件平台化」的优势是显而易见的。
首先是大大提高了业务效率,不需要每次从 0 开始做适配,搞碎片化开发;
其次,从商业角度来说,也大大为主机厂节省了方案落地的周期和成本;更重要的是,在同一平台上做开发的经验可以积累迭代,反哺技术向上突破。
正是基于这样的平台化能力,Nullmax 不仅打造了德州仪器 TDA4 芯片和英伟达 Orin 芯片平台的行泊一体化智能驾驶解决方案,并完成阶段性交付,还与地平线、黑芝麻智能等达成自动驾驶战略合作,未来有望将行泊一体功能上载到更多车型。
03
大规模量产背后,性价比是关键
Nullmax 的优势,不仅在于其软件平台化拥有超强的扩展性和极致的性能,更突出的是,能提供极具性价比的方案。
这对主机厂而言,意味着巨大的诱惑力。

尤其在一些中低端车型,主机厂十分看重供应商的成本管控,甚至可以说,行泊一体功能的出现,很大程度就是由主机厂「降本增效」的需求驱动的。
「同样的成本,我们能做到更优的性能;同样的性能,我们可以用更低的成本实现。」徐雷透露,在向某头部车厂交付的视觉感知算法方案中,Nullmax 基于 8 TOPS 的单 TDA4VM 平台,接了 4 个周视摄像头,在 CPU 上分配的是 20k 的算力,而 Nullmax 实际只用了不到 4k 的算力,就实现了同等性能。
更值得一提的是,4 个摄像头不仅能达到 20 FPS 的检测速度,且不跳帧或丢帧,而是每帧都检测,延时还能做到小于 100 毫秒。
而在双 TDA4VM 的配置下,搭配 5R11V 的传感器组合,Nullmax 能用 16 TOPS 算力实现了其他方案供应商在 30+TOPS 算力下才能达到的效果。
目前,Nullmax 的众多量产项目中,一部分就是面向经济车型提供 L2+的智能驾驶解决方案,其算法随 TDA4 搭载在智能驾驶域控制器上。
IPU01/02 是德赛西威旗下高性价比方案,在有限的成本范围提供一定功能的 ADAS 应用,帮助车企快速实现功能搭载。
其中 IPU01 最早量产,年出货量达到百万套级别,而 IPU02 自 2021 年推出,是德赛西威目前正在大力开发和推广的方案。
德赛西威副总裁李乐乐曾表示,IPU02 比 IPU01 的客户还要宽,除了现有一些客户之外,还进入了上汽、长城、广汽、通用以及造车新势力等车企配套体系,类似于 IPU01 在 2017 年的状态,后面随着行泊一体的发展,将有更多项目会落地,在 2022 年陆续量产爬坡,而到 2023 年,很多量产项目能起规模。
这也正是 Nullmax 的计划之一,借助即将迅速起量的 TDA4 平台域控,尽可能多地占领市场。「在 10 到 15 万的车型上,我希望我们行泊一体成为车企标配的方案。」徐雷直言不讳地说出了 Nullmax 的目标。
而更深一层的目的在于通过搭载在更多车型上,大量积累数据迭代算法,让技术逐渐达到 L4 级别的能力。
与业内当下的主流观点一样,相比于「一步到位」的跨越式路线,徐雷更看好厚积薄发的渐进式路线。「自动驾驶归根结底还是由数据驱动,只有更多的车在路上跑,才能验证并驱动技术的成熟度,不断提高泛化能力。」
除了布局中低算力行泊一体,Nullmax 也在基于大算力实现更高阶的功能,例如在 100TOPS 以上算力,能像特斯拉 FSD 一样,提供覆盖城区道路的全场景智能驾驶体验,且不依赖高精地图。
Nullmax 称之为 USD,该功能将在 2023 年完成量产交付。
可以看到,行泊一体正在从不同细分市场,一步步融入人们的日常。
而以 Nullmax 为代表的自动驾驶企业,纷纷暗自发力,争夺智驾上车的入口。
「窗口期就是这两三年了,时间不会太久,我们很有信心。」徐雷表情轻松地说道
0
分享
好文章,需要你的鼓励












参与评论
请您注册或者登录汽车之心社区账号即可发表回复
去登录
相关评论(共0条)
查看更多评论